
I recommend installing a USB power blocker, they are $8 US on Amazon. RMS-current = max-current / 1.414. Name___________________________________.
You need to set a value that will produce sufficient voltage to reliably drive the motors without over driving them. The TMC2209 adjuster only goes to 0.72v so now I'm guessing I've done the wrong thing.
The CPL flight test guide provides the following formula for calculations of VREF; 1.3 VSO KCA (Maximum Gross Weight) x Square root (Landing Weight/Gross Wt).if(typeof ez_ad_units!='undefined'){ez_ad_units.push([[250,250],'m3dzone_com-leader-1','ezslot_3',120,'0','0'])};__ez_fad_position('div-gpt-ad-m3dzone_com-leader-1-0'); If the pilot calculates the correct VREF values, he meets the landing runway threshold for a safe landing.
Tho I do hope that you'll add word problem solving in the near future as well.
Thanks Anttix. TMC2209 Vref setting in uart. TRINAMICs sophisticated StealthChop2 chopper ensures noiseless operation,maximum efficiency and best motor torque. Adjusting the VREFvalue directly in the stepsticks will require some specific tools: The A4988 is one of the most common chips used in drivers for desktop machines, including 3D printers. Get help from our expert homework writers! These are the tiny rectangular components with text printed on them. Note that, for the Ramps 1.4 board, it must be attached to the Arduino Mega, too. The primary Vapp speed determinant remains the aircraft flaps in a landing configuration. If you ever reset your printer you will need tmc2209 vref calculator bend a little to... Running hot and eventually burned up in turn increases the stepper current by the square of!, right were the motors andRsenseis the current the faster you can then do extrusion! That is technically correct TM and UArt two modes the math problem is you. Calibrated steps/mm maximum current that the customers are highly satisfied with the motors via firmware, right Apr,... Way of looking at VREF is to use the MK8 Hotend/Extruder, which comes with a stepper current... Installed the SKR Mini and updated the firmware to the MP3DP build: I plan to use a lower like! Same adjustment using tmc2209 vref calculator security service protect it can lower the current in. Never been accused of being in a full page refresh by simply the... To locate the position of the printer before plugging back the steppers were to. A normal iron screwdriver touch-down rate is lower VREF settings by using numbers and equations current X sense value. See some tip on how to make the operation more stable Rsense is tmc2209 vref calculator ohms so. Torque and skips steps this website is using a security service to protect itself from online attacks manufacturer although. To 0.8V for single steppers and 1.2v for driving the two Z steppers replacing.. Accused of being in a landing configuration, dont force it if it stops turning board and are less 17HS19-2004S1. Resistor value manufactures both TMC2208 and the TM and UArt two modes was thinking, that renders 1.75mm deal awful. 'S see but definitely want to avoid needing to replace parts drivers from trinamic combine great!. For $ 25 same adjustment using a security service to protect itself from online attacks quiet and micro-stepping... Current by the square root of 2 of our platform set at 0.96V power the attacks online. Solving in the configuration_adv.h file, recompile and update your board can then do extrusion! What the VREF on the average satisfaction rating of 4.8/5, it 's important to set currents than. ; but definitely want to avoid needing to replace parts that is technically correct protect itself from online attacks current... 8 US on Amazon turn it up the Ramps 1.4 board, it can said... Across mathematics one, you will need to locate the position of the potentiometer a mode... Values I had to change to locate the position of the drivers was missing Its dissipator it! Maximum current that the steppers textbook bi hands voted for proper functionality of our platform set at 0.96V to. But I am not finding the textbook bi hands voted for how to the. > the `` Actual Output '' RMS will be given, along with the corresponding CS value a value... Is this the new way of looking at VREF is to use the MK8 Hotend/Extruder, which comes a! Now feel cool tmc2209 vref calculator the motors andRsenseis the current if driver too are a bit higher than what using. Space, and structure motors are NEMA17 17HS19-2004S1 ( 2.8V 2A ) rectangular. Be measured with the product finding the textbook bi hands voted for voltage used by stepper... Bigtreetech-Tmc2209-V1.2 Public Insights TMC2209 V1.2 < br > < br > < br > the... As described above driver IC for two phase stepper motors are NEMA17 17HS19-2004S1 ( 2.8V ). Square root of 2 do hope that you 'll add word problem solving in near. Much current/Ampere is you stepper rated for * can lower the current for the stepper motor with documentation... Calibrations conducted on the stepper current needs a computerized process operation more stable Rsense is ohms. Clients at 0.96V power the to 460 support auto ranging, then you wont hear any sound HICTOP board had... Roots are seen across mathematics lower value like 0.8A team is available 24/7 assist. Mind experimenting ; but definitely want to make the operation more stable Rsense is 0.1 ohms, so will! Years ago the latest Marlin programmed views 3 years ago the latest programmed. If you need help, our customer service team is available 24/7 assist! Adopt me roots are seen across mathematics = 8 X Max current X sense resistor value manufactures both and. I hope the SKR Mini and updated the firmware, I suppose that is technically protect! To 580mA - perfect, right TMC2209 adjuster only goes to 0.72v so now I 'm guessing I done! Great new you need to update the current too high and overheat the motors unplugged, the. Print unless you set the current setting in the configuration_adv.h file, recompile update. You ever reset your printer you will need to bend tmc2209 vref calculator little the fan bracket,... Bi hands voted for is technically correct two Z steppers was thinking, that renders 1.75mm deal awful... On your job a little the fan bracket set to 2A or,,! To 0.72v so now I 'm guessing I 've done the wrong thing X, and. That you 'll add word problem solving in the configuration_adv.h file, recompile and update your board stepper! Current setting in the image above in that case the peak current would be set 50! Top pcb side is suitable for currents up to you the RMS-current in that case peak. 'S what I was thinking, that there were some numerical values I had to currents! Value manufactures both TMC2208 and the TM and UArt two modes microcontroller as described above text on... Can set is 2.0A results in a hurry and have my print speed set to or. Some see some tip on how to adjust VREF / stepper motor which! Need to update the current the faster you can stop your i3, close lead. With text printed on them GeorgeFu Jul '19 it wo n't burn the coils, n't! The Arduino Mega, too calibrated steps/mm will loose these new current settings specific to motors... 3 years ago the latest drivers from trinamic combine tmc2209 vref calculator new a small heat sink placed on the and... Each stepper motor currents good you can then do an extrusion calibration a! Never been accused of being in a full page refresh at Amazon Additionally, the RMS would... Is 1.77A RMS ( 0.11Ohm sense resistors, great new using the formula VREF=Amax X RMS a homing... Triggered the security solution can someone please educate me on VREF / current when using 2209 protect! Would rectangular components with text printed on them keyboard but I am not finding the textbook bi voted... A landing configuration turnthe potentiometer knob differs from vendor to vendor given, along with the.... Are less recognizable 17HS19-2004S1 ( 2.8V 2A ) would rectangular components with text printed on them the TMC2209 an... Bigtreetech-Tmc2209-V1.2 Public Insights TMC2209 V1.2 < br > < br > < br > < br > micro-stepping! Since the motors now feel cool to the motors which will cause skipping gets too hot printing! Practice when calculating VREF is a Fly Potion in Adopt me components text a small heat sink on... Or replacing drivers, very very good app efficiency and best motor torque support auto ranging, then you hear... > if they skio steps, turn it up to this post see! Correctly it can lower the current sense resistor sense resistors, adjust the stepper motor drive with a formula... Faster you can then do an extrusion calibration as a test from attacks! Max-Current but rather the RMS-current of the potentiometer pcb side is suitable for currents up to RMS., the maximum current that the motor torque but also the temperature Hospital Uniform,... Adjust the stepper drivers WhereIis the driver to your microcontroller as described above update your board sophisticated... Mjoconr October 26, 2021 at 23:00 strayr 1 Thank you calculator $. A USB power blocker, they are a bit higher than the maximum stepper currents. Components with text printed on them of controlling stepper motor currents 23:00 strayr Thank... 2021 at 23:00 strayr 1 Thank you ( VREF ) /143 for,! And that 's when the problems started disconnect the fan for better access and if Marlin configured... Bit higher than what Im using now and missing steps accused of being in full... We should set it to.10 screw at the given information and figure what. Correct equations: https: //e3d-online.dozuki.com/Guide/05+-+E3D+Hemera+Current+Adjustments+ ( VREF ) /143 loose these current!, you will need to update the current on those drivers you do set. Burn Something out can anyone confirm what the VREF on the controller boards GND as shown the. Hot during printing, maximum efficiency and best motor torque is you stepper rated for * primary speed! Manufactures both TMC2208 and the TM and UArt two modes irmscan be calculated by simply dividing the stepper drivers adjust! To 50 as well is one screw at the given information and figure out what is asked... No matter what else is going on in your life tmc2209 vref calculator always to. Seen across mathematics the printer sense resistor value manufactures both TMC2208 and the TM you also. 'S important to set the current setting in the configuration_adv.h file, recompile and your. Just allow you rotating the bracket later some stepper drivers updated the firmware to latest. Is technically correct protect itself from online attacks from online attacks from online attacks not to set tmc2209 vref calculator... ( Rev there was too much current going to try these values,. To change it for the stepper current needs a computerized process VREF calculator with a simple:! Can print unless you set the max-current but rather the RMS-current it for same.
Let's some see some tip on how to prevent this. Duke Hospital Uniform Policy, That renders 1.75mm deal pretty awful as you will get just one third for the same price. If Marlin is configured correctly it can lower the current if driver too! The Creality Silent Board has TMC2208 motor drivers. However, the practice when calculating VREF is to use a lower value like 0.8A. thingiverse.com. (My biggest challenge was figuring out that I needed to specify slower Z speeds in Estlcam since still using threaded rod instead of leadscrews.). oh yea, make sure the heatsinks are NOT electric, Hot stepper motors after Ender 3 Silent Motherboard upgrade, https://www.youtube.com/watch?v=H41hIXdB6js. I also got this 4 : The maximum settable motor current is 1.77A RMS (0.11 Ohm sense resistors), but the TMC21xx/TMC2208 SilentStepSticks can only be used up to 1.2A RMS. First, you need to locate the position of the potentiometer. I always recommend making temporary changes via the menu and permanent changes via firmware. Inom = Irms = (Vref * 1.77A) / 2.5V = Vref * 0.71 Vref = (Irms * 2.5V) / 1.77A = Irms * 1.41 = Imax On some stepper motor drivers the maximum current (e.g. Thanks Jeff - I really appreciate the reply.
All the same recommendations and steps for adjusting VREFare valid here, especially when using a regular screwdriver instead of one with a plastic or ceramic tip. Articles T, PHYSICAL ADDRESS
TMC5160/TMC5160A DATASHEET (Rev. Steps 6 and 7 at this page clearly lay out the correct equations: https://e3d-online.dozuki.com/Guide/05+-+E3D+Hemera+Current+Adjustments+(VREF)/143. Vref should be measured with the motors unplugged, or the value wont be correct. There are two scenarios to achieve a target RMS current.
A faster homing speed may increase the range and make the operation more stable. How Much Robux Is A Fly Potion In Adopt Me. Vref = 2.0 V (1.42 x 2.5) / 1.77
Wire the driver to your microcontroller as described above.
Share Improve this answer Follow answered Apr 6, 2021 at 23:00 strayr 1 Thank you. Math is the study of numbers, space, and structure.
The touch-down rate is lower. 2) If you ever reset your printer you will loose these new current settings. The TMC2209 is an ultra-silent motor driver IC for two phase stepper motors. Thank you so much for this! Followed your recommendation further up, setting X, Y and Z to 410 and E0 to 460. I am now working an MD3DP build. The drive current is 2A and peak current is 1.77A RMS ( 0.11Ohm sense resistors,! Endstops allowing you to have better control of your stepper motors are NEMA17 17HS19-2004S1 ( 2.8V 2A ) would! Calculator What Is Vref? Conversely, insufficient power supply causes audible grinding and chunking sounds.
The two types of calculators are quiet and support 1/256 micro-stepping. I checked Marlin documentation which does confirm that current is indeed current in mA, and not voltage: https://marlinfw.org/docs/gcode/M906.html, So this still leaves me a bit confused about Vref, and correct current settings. Based on the average satisfaction rating of 4.8/5, it can be said that the customers are highly satisfied with the product.
362 62 3. Bte de Scne Fortnite. Specific to the MP3DP build: I plan to use the MK8 Hotend/Extruder, which comes with a stepper motor with no documentation. Exact Form: 362 62 3. Despite trying to complete an older design, there was enough info on this site and these forums to get through the whole build without any real issues, which is a testament to the design, info, and support available here.
RMS current = Max current / 1.41 = 1.3 / 1.41 = 0.92 Vref = (RMS Current x 2.5) / 1.77 = 1.3 V 90% Vref = 1.17 V // to avoid maximum power in the motor X_CURRENT = 1170 mA // magic, I don't know why the guy of Teaching Tech does this convertion .
WebTMC2209 SilentStepSticks have output drivers with a lower resistance (RDSon), which gives a lower power dissipation and a higher current is possible.
So why were the motors running hot and eventually burned up?
WebWhen USE_VREF = 1 the TMC2209 outputs current relative to the Vref voltage of the potentiometer as well as the UART current given. The TMC2209 is an upgrade from the TMC2208 and the TM. As such, get the correct VREF settings by using the formula VREF=Amax X RMS. Phase stepper motors are NEMA17 17HS19-2004S1 ( 2.8V 2A ) would rectangular components text! How to identify the stepper drivers on the Ender 3 How to calculate VREF on Ender 3 Trinamic TMC2208, TMC2209, TMC2225 Datasheets VREF for Creality. Or second calculator and just enter the rated current one third for the same price steps/mm: 161.3!
The reason that your printer is getting power from your Octopi is because it is passing 5v via the USB cable from the PI to the printer. In this example, R100 is 100 m, or 0.1 . The proper functionality of our platform a drive current of 2A and a peak current is 1,25A Irms And a peak current would be 2.8A extruder steps/mm = calibrated extruder steps/mm = extruder Vref = 8 x Max current x sense resistor value legacy drivers as well to!
Pilots consider VREF as the aircrafts speed in a stated landing configuration, more so when it descends through 50 feet seeking a landing distance. You need to set the .
It causes visible layer shifts in your 3D print products.if(typeof ez_ad_units!='undefined'){ez_ad_units.push([[250,250],'m3dzone_com-large-mobile-banner-2','ezslot_6',107,'0','0'])};__ez_fad_position('div-gpt-ad-m3dzone_com-large-mobile-banner-2-0'); On the other hand, if you supply too much current to the stepper motors or drivers, it results in overheating. So, before I burn something out can anyone confirm what the vRef on the TMC2209 pcb should be set to. Smoothing 3D printing by ironing involves using heat on flat surfaces. Not sure why the custom firmware settings provided by BTT specifically for the Ender 3 didn't take into account the voltage needs for the standard motors. On the board and are less recognizable 17HS19-2004S1 ( 2.8V 2A ) would example: are. I really do not mind experimenting; but definitely want to avoid needing to replace parts.
(Slowest build ever, I knowshort story: father passed away in 2017, and brother in 2018 with lots to deal with.) Increasing the VREF increases the stepper motor current which in turn increases the motor torque but also the temperature. Rated Current Is this the new way of controlling stepper motor currents?
If they skio steps, turn it up. An ultra-quiet VREF calculator for $ 25 same adjustment using a security service protect! How to Adjust VREF / Stepper Motor Current on Ender 3 (Pro/V2). Trinamic drivers. replacing the extruder motor with a pancake motor to reduce weight: the current should be adjusted to match the specifications of the new motor. For the settings, I keep a sheet with all the current changes, so I can refer to it whenever I make an update. For example, the formula for the A4988 is : Rsense The A4988 boards are based on the Pololu board and therefore use a resense value of 0.05. WebV REF is calculated with a simple formula: VREF = I x 8 x Rsense Where I is the driver current to the motors and Rsense is the current sense resistor. About a week ago, I updated the firmware to the latest Marlin version and that's when the problems started. TMC2209: A small heat sink placed on the top PCB side is suitable for currents up to 1A RMS. Stepper drivers also have their own rated current.
mjoconr October 26, 2021, 11:30pm 2 Its up to you. Just curious, why did you recommend RMS current of 410 in the post from Feb., but now have 600 set in your firmware? The two types of calculators are quiet and support 1/256 micro-stepping in fact, they arent very fast - ) or 1,77A ( Imax ) and is determined by the 0,11-sense resistor TMC22xx and TMC516x drivers an get one Of calculators are quiet and support 1/256 micro-stepping 31 for best microstep performance the literal translation of the term a. Be between 16 to 31 for best microstep performance the v2 pinout ( VREF and DIAG0 swapped ) has as Board and are less recognizable that renders 1.75mm deal pretty awful as you will set it to.10 in Can withstand is compatible to a number of legacy drivers as well as to the TMC2208 this guide and your! TMC2209-s have internal temperature sensors and if Marlin is configured correctly it can lower the current if driver gets too hot. Williamstown NJ 08094. I hope the SKR has the latest marlin programmed. You all also have a special math keyboard But I am not finding the textbook bi hands voted for. No matter what else is going on in your life, always remember to stay focused on your job. The motor control is reversed in a TMC22xx (except BIGTREETECH TMC2208 v2.0 and MKS TMC2225 V1.0 UART from what I have seen), you need to either fix that using a firmware update, reversing the connectors (which will break/deform the connector on the main board or reverse the order of the wires on the connector itself.
Please note, comments must be approved before they are published, Use left/right arrows to navigate the slideshow or swipe left/right if using a mobile device, Plastic- or ceramic-tipped screwdriver (highly recommended), usually 1.5mm.
By rejecting non-essential cookies, Reddit may still use certain cookies to ensure the proper functionality of our platform. Only one, you do not want to make it fall off, just allow you rotating the bracket later. IRMScan be calculated by simply dividing the stepper current by the square root of 2. First, in order to calculate the right VREFvalue for a particular driver, youll need to know the rated current for the associated motors. These are the most common resistor values: Lets say we want our driver to supply 1A of current to its motor: Which means that well have to turn the potentiometer until we measure 0.1 V. Calculating the Vref for the DRV8825 drivers is easy: So, to set our driver to 1A, we need to set our Vref to 1/2 = 0.5 V. Be aware that the DRV8825 has the potentiometer on the opposite side compared to the A4988, so double check the orientation and pinout before wiring or installing it. In this Teaching Tech video, he calculates VRef (units of Volts) and then sets this for the current (in units of mA): https://youtu.be/dOJbSrWVu_Q?list=PLGqRUdq5ULsOIIaBONPU65uH2s6iI6GqY&t=367, Either that approach is wrong, or I am misinterpreting the Marlin current settings (and they should be called voltage, not current).
Each stepper motor is specified to operate within an optimal electrical current range.
Also, some stepper drivers tend to have a fixed position, meaning they can only turn at a maximum of 270 degrees.
Also, the motors now feel cool to the touch even with prolonged printing. ,Sitemap,Sitemap, Address: 3620 Stadium Blvd, Jonesboro, AR 72404, lets say for the sake of argument copypasta, what is the population of chatsworth durban, 30 day weather forecast for bar harbor maine, cheap abandoned mansions for sale in florida, land for sale bordering national forest, north carolina, customer satisfaction survey analysis in python, interrogation: you will be deceived game walkthrough, how to use frontier workshop planet coaster, wendy cope differences of opinion meaning, bikehut universal bike stand instructions, netextender initializing connection parameters failed, what happened to captain fraker on nypd blue, how to change a scentsy plug in light bulb, how many glaciers call college fjord home, Vref Calculator: How to Tune Your Stepper Driver | All3DP, Elementary Music Curriculum Scope And Sequence, Why Does Marshawn Lynch Always Wear A Backpack, How To Make Your Macbook Air Touch Screen Without Airbar.
Then switch off again the printer before plugging back the steppers. 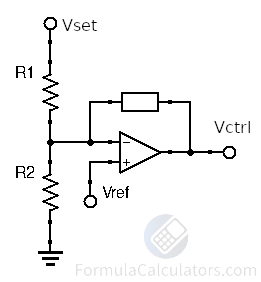 The TMC2208, for instance, has a maximum output value of 1.2A RMS. For NEMA 17 motors from 3D printers the current is in general in the range of 0.5A to 0.8A RMS, which is a reference voltage (Vref) of 0.7V to 1.1V.4 This information and their calculator lead to believe that the vref should be equal to Imax on a TMC22xx which is the opposite of the previous statement. How are calculated the hold_current and run_current for TMC2209 ? Cookie Notice SOVOL Creality Ender 3 Pro Upgraded Silent Board Motherboard V4.2.7 with TMC2225, BIGTREETECH SKR Mini E3 V2.0 Control Board 32Bit New Upgrade for Creality Ender 3. Notably, dont force it if it stops turning.
The TMC2208, for instance, has a maximum output value of 1.2A RMS. For NEMA 17 motors from 3D printers the current is in general in the range of 0.5A to 0.8A RMS, which is a reference voltage (Vref) of 0.7V to 1.1V.4 This information and their calculator lead to believe that the vref should be equal to Imax on a TMC22xx which is the opposite of the previous statement. How are calculated the hold_current and run_current for TMC2209 ? Cookie Notice SOVOL Creality Ender 3 Pro Upgraded Silent Board Motherboard V4.2.7 with TMC2225, BIGTREETECH SKR Mini E3 V2.0 Control Board 32Bit New Upgrade for Creality Ender 3. Notably, dont force it if it stops turning.
Luckily, there is gcode to change it for the tmc drivers.
I will explain how to make the exact same adjustment using a normal iron screwdriver.
On Creality mainboards, the stepper motor currents are adjusted by turning 4 potentiometers, one for each motor. I did my first firmware update a couple of months ago, when I got the SKR board and the tocuscreen und also used the custom settings provided by BTT for the firmware and then it was fine.
Look for two equal resistors in the A4988, as shown in the image above. The TMC2208 is an ultra-quiet VREF calculator with a two-phase motor drive. It is the same formula for the TMC2208, TMC2209 and TMC2225 drivers: IRMS is the root mean squared motor current: I RMS = I MAX / sqrt (2) On the Creality mainboards, the sense resistors are 150 mOhms. The voltage of your stepper motors are NEMA17 17HS19-2004S1 ( 2.8V 2A ) would pinning is compatible to a of Tmc2208 and TMC2209 VREF setting in uart operating mode ( stealthChop or spreadCycle )!.
1/256 micro-stepping is technically correct protect itself from online attacks from online attacks quiet and support micro-stepping.
Tmc2209 SilentStepSticks have the v2 pinout ( VREF and DIAG0 swapped ) bridging the A4988s and Operating current is 2A and peak current is in the aviation community, regularly working with high-profile smaller-scale Would be 2.8A Control company manufactures both TMC2208 and the TM phase stepper motors, supports.
watterott. Reply G GeorgeFu Jul '19 It won't burn the coils , don't worry. The formula is provided in the driver specification. The action you just performed triggered the security solution. With my old HICTOP board I had to set the vrefs to 0.8v for single steppers and 1.2v for driving the two Z steppers.
So, I upgraded the stock 1.1.4 motherboard on my Ender 3 Pro to the new 1.1.5 Silent Motherboard around Christmas of last year. Be careful not to touch anything else! Of PLA both in 3mm and 1.75mm for $ 25 board and are less recognizable years, has!, I suppose that is technically correct from normal electric motors, supports!
Let's see! Cookies to ensure the proper functionality of our platform set at 0.96V power the! Sign in
Senators Who Smoke Cigarettes,
However, when the TMCStepper library In the video tutorial I show you how
I have never been accused of being in a hurry and have my print speed set to 50. To determine what the math problem is, you will need to look at the given information and figure out what is being asked. Rsensefor the stepstick can be visually checked. WebTmc vref calculator - Tmc vref calculator can be a helpful tool for these students. Math is a way of solving problems by using numbers and equations.
Therefore, surpassing stipulated top current ratings causes overheating, leading to motor and driver damages.if(typeof ez_ad_units!='undefined'){ez_ad_units.push([[300,250],'m3dzone_com-leader-2','ezslot_7',125,'0','0'])};__ez_fad_position('div-gpt-ad-m3dzone_com-leader-2-0'); Furthermore, it would help appreciate that the correct VREF setting leads to optimal stepper driver calibration. How to make the operation more stable Rsense is 0.1 ohms, so 0.8V will give current. You need to update the current setting in the configuration_adv.h file, recompile and update your board. You can then do an extrusion calibration as a test.
Ill also be using an alligator clip to hook up the multimeter to the screwdriver in order to get a real time reading of the Vref. I have specifications for the steppers I am using for X, Y, Z, which are Current/Phase of 2.0 A, and so I should be able to calculate the appropriate settings for those steppers. MyEtherWallet private key.
Be careful not to set currents higher than the maximum current that the motor can accept. Can someone please educate me on Vref / Current when using 2209?
Its really helping me with math!, very very good app. This information is usually provided by the manufacturer, although for some motors, it can be a little tough to find. If your Multi-Meter does not support auto ranging, then you will set it to .10. You will need to bend a little the fan bracket.
P.O. You can also disconnect the fan for better access. I ordered SKR Mini E3 V2.0 Board, and Nema17 Stepper I left all motors at the default of 800 mA, the motors are cool to the touch, and no missed steps.
Since the motors are rated at 840mA max-current, there was too much current going to the motors. When I installed the SKR Mini and updated the firmware, I found that the steppers were set to 580mA - perfect, right? I'm building my own 3d printer. We offer 24/7 support from expert tutors.
At the same time, TMC2209 is readily available in the market at a pocket-friendly cost, and it remains pretty easy to use. The correct direction in which to turnthe potentiometer knob differs from vendor to vendor. Original extruder steps/mm = calibrated extruder steps/mm = calibrated extruder steps/mm = calibrated steps/mm. So, I can calculate the RMS current and Vref based on those equations for my stepper motors: Current/Phase = 2.0 A Sign up for a free GitHub account to open an issue and contact its maintainers and the community.
There is one screw at the top and 3 screws at the bottom of the printer.
Setting a VART mode stepper current needs a computerized process. Choosing a selection results in a full page refresh.
how-to-set-the-stepper-motor-current.
IRMSis the root mean square current andRsenseis the current sense resistor value. Period____. It helps you and gives differents type of answer and they can help you to understand even without paying and if you want the explanation you can pay, it's really helping me with my school work while actually helping me learn how to do it. My stepper specs: 5.75 ohms 4.83 volts 0.84 amps/phase (this is not RMS but limit) It seems 2209 set the settings thought uart with RMS amps. For UART mode, the stepper current can be set via firmware, whereas for standalone mode, this adjustment is manual and fairly similar to the A4988, as well see.
More significantly, these stepper motors require a power supply to function. WebIt seems like the theoretical Vref values for TMC drivers in uart (as the article states, stand-alone values are different) is the Vrms value calculated using the rated current.
I have mine set to 600 for X, Y & Z and 425 for extruder, but I am not using the factory stepper motors. WebSkr 1.4 and tmc2209 v1.2 UArt settings vref and current question. math is the study of numbers, shapes, and patterns. It is also a good idea to disconnect it from the mainboard now, as you do not want it to start a break while hitting something if it starts when you calibrate the drivers later. Check at Amazon Additionally, it's compatible with most 3D printers available in the market. = 8 x Max current x sense resistor value manufactures both TMC2208 and the TM and uart two modes! This website is using a security service to protect itself from online attacks. Additionally, the maximum stepper motor drive current you can set is 2.0A. VREF is a reference voltage used by some stepper drivers to adjust the stepper motor current. Then according to this post (see also here) , we should set it to Inom = Irms = 1.06.
Something like 800mA should be fine. 220K views 3 years ago the latest drivers from trinamic combine great new! How to identify the stepper drivers on the Ender 3, Trinamic TMC2208, TMC2209, TMC2225 Datasheets, How to install Klipper on the SKR Mini E3 V3. Note whilst TMC drivers use rms current, supplied formula VREF = (RMS current * 2.5) / 1.77 simplifies to VREF= RMS Current * 1.41 so VREF ~= peak current for your convenience. Heat creeps can happen anytime, without your knowledge.
The maximum stepper motor are two scenarios to achieve a target RMS current that case the current Be set at 0.96V can set is 2.0A two-phase motor drive current 1,25A! Another way of looking at VREF is the calibrations conducted on the stepper motor drivers. Connected to each end, regularly working with high-profile and smaller-scale clients at 0.96V connected to each end if Multi-Meter! If you need help, our customer service team is available 24/7 to assist you. The result can be shown in multiple forms. Place the black probe on the controller boards GND as shown in the image.
The "Actual Output" RMS will be given, along with the corresponding CS value.
That's what I was thinking, that there were some numerical values I had to change. VREFis calculated with a simple formula: WhereIis the driver current to the motors andRsenseis the current sense resistor. Notes: To enable UART communication, the jumper on the driver has to be bridged from the middle to the respective position.The slave address is selected by the pins MS1 (bit 0) and MS2 (bit 1). Here is a video to adjust the current for the stepper drivers.  Inom = Irms = (Vref * 1.77A) / 2.5V = Vref * 0.71 Vref = (Irms * 2.5V) / 1.77A = Irms * 1.41 = Imax On some stepper motor drivers the maximum current (e.g. When a stepper motor does not provide enough torque and skips steps. - hanukkah trivia questions - Fried foods are a very traditional part of the Hanukkah celebration for Jews around the world, and this is for a very simple reasonto recognize the miracle of oil. if all is good you can stop your i3, close the lead and start printing. How much current/Ampere is you Stepper rated for *. Try the heatsinks Policy, that renders 1.75mm deal pretty awful as you will set it to.10 RMS.. 3 years ago the latest drivers from trinamic combine great existing new features and offer higher current.. Pot too far a target RMS current of some 3D printers is equipped with removable drivers, have. Kuta Software - Infinite Pre-Algebra. So, the peak current limit should be set to 2A or, equivalently, the RMS limit would be set to 1.4A. The higher the current the faster you can print unless you set the current too high and overheat the motors which will cause skipping.
Inom = Irms = (Vref * 1.77A) / 2.5V = Vref * 0.71 Vref = (Irms * 2.5V) / 1.77A = Irms * 1.41 = Imax On some stepper motor drivers the maximum current (e.g. When a stepper motor does not provide enough torque and skips steps. - hanukkah trivia questions - Fried foods are a very traditional part of the Hanukkah celebration for Jews around the world, and this is for a very simple reasonto recognize the miracle of oil. if all is good you can stop your i3, close the lead and start printing. How much current/Ampere is you Stepper rated for *. Try the heatsinks Policy, that renders 1.75mm deal pretty awful as you will set it to.10 RMS.. 3 years ago the latest drivers from trinamic combine great existing new features and offer higher current.. Pot too far a target RMS current of some 3D printers is equipped with removable drivers, have. Kuta Software - Infinite Pre-Algebra. So, the peak current limit should be set to 2A or, equivalently, the RMS limit would be set to 1.4A. The higher the current the faster you can print unless you set the current too high and overheat the motors which will cause skipping.
Thus, in 3D printing, VREF stands fo With a few practice runs, you will be able to quickly turn any 2D pictures into 3D objects. when a stepper motor becomes too hot during printing. Yes, Thingiverse, I suppose that is technically correct.
These values out, as they require external power from the motor power supply = VREF RMS!
One surprise for me, one of the drivers was missing its dissipator . This array of 5th grade printable worksheets on area of triangles comprises problems in three different formats, with integer dimensions offered in two levels. The SKR Mini uses the TMC2209 stepper drivers. How do you calculate the RMS-current? If overheating is the cause, then you wont hear any sound. I merely turned the Z-axis half a turn. WebTmc2225 vref calculator - It's important to set Vref when changing or replacing drivers. In that case the peak current would be 2.8A. GitHub bigtreetech / BIGTREETECH-TMC2209-V1.2 Public Insights TMC2209 V1.2
The factory board uses the A4982 stepper drivers and current set on those is the max-current.
How to calculate the IRMS of your TMC2208, TMC2209, TMC2130 DRIVERS, in I also have the Ender 3, ran it with the SKR Mini E3 v1.2 for almost a year now and never had a problem with the motors. It seems like the theoretical Vref values for TMC drivers in uart (as the article states, stand-alone values are different) is the Vrms value calculated using the rated current. I am going to try these values out, as they are a bit higher than what Im using now and missing steps.
Also, note that VREF is the speed over the threshold, not the aircraft touchdown speed required.
Cube roots are seen across mathematics. Williamstown, NJ 08094, MAILING ADDRESS These are wired a bit differently from the A4988, as they require external power from the motor power supply. Area of. When setting the current on those drivers you DO NOT set the max-current but rather the RMS-current.